Revolutionizing Rescue Operations
CADMAS (Camera Driven Multi-Agent System) is motivated by the use of helicopters as the workhorses of search and rescue operations.
PROJECT MOTIVATION
Helicopters can quickly survey areas that are normally too hazardous for large ground search teams. During rescues, however, they are often pushed beyond their designed limits and are statistically more likely to crash (Baker et al., 2005).
OUR MISSION
The intent of our project is to devise a system of robots to perform an alternative method of search and rescue. An aerial robot will leverage the surveying ability of a helicopter, and a team of grounded robots will perform a rescue operation that would otherwise endanger the aerial robot and/or the individual in need of rescue. The aerial robot will provide mapping and optimized control to each unaware ground robot. This will shift the computational load involved to the aerial robot to make each ground robot cheap and sacrificial, allowing for a scalable ground swarm. As such, the core of the project lies in the creation of a flexible and easily scalable system.
THE DETAILS
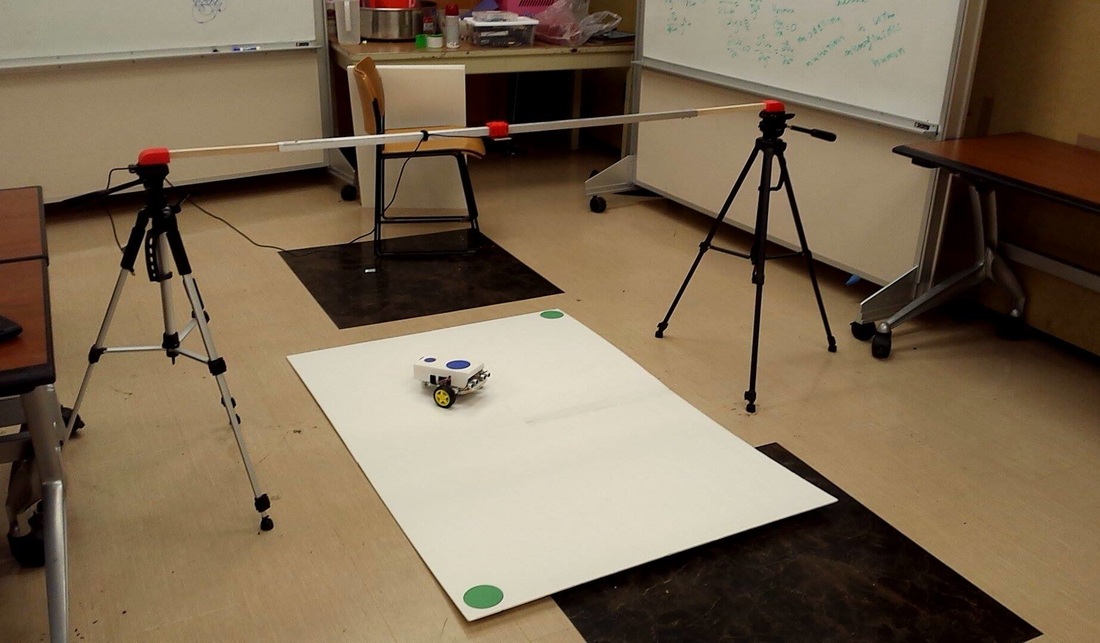
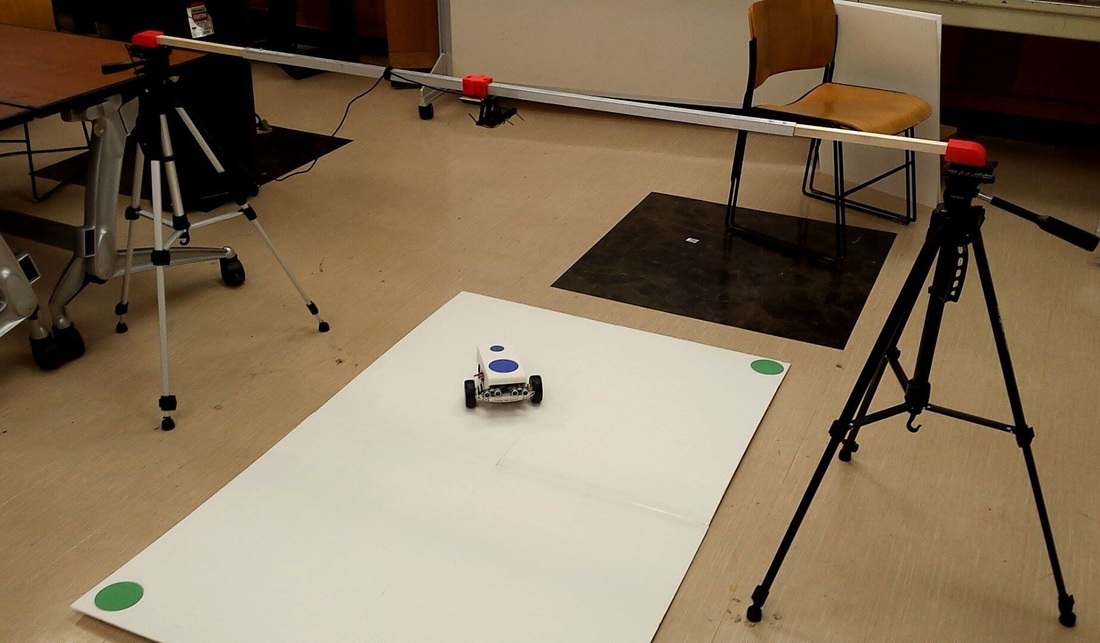
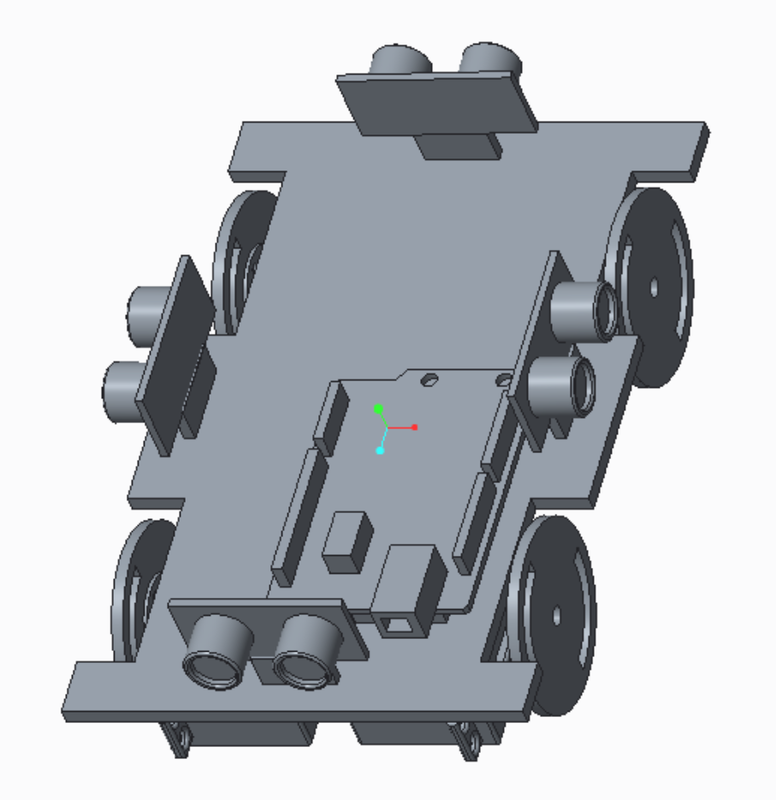
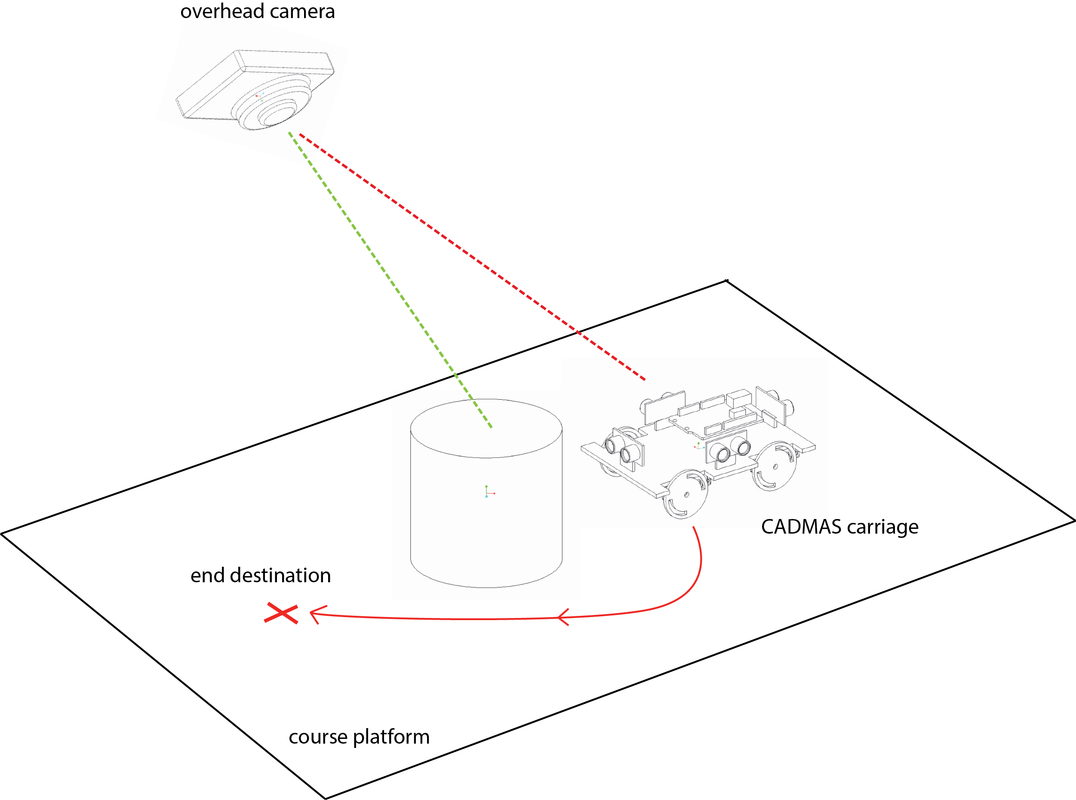
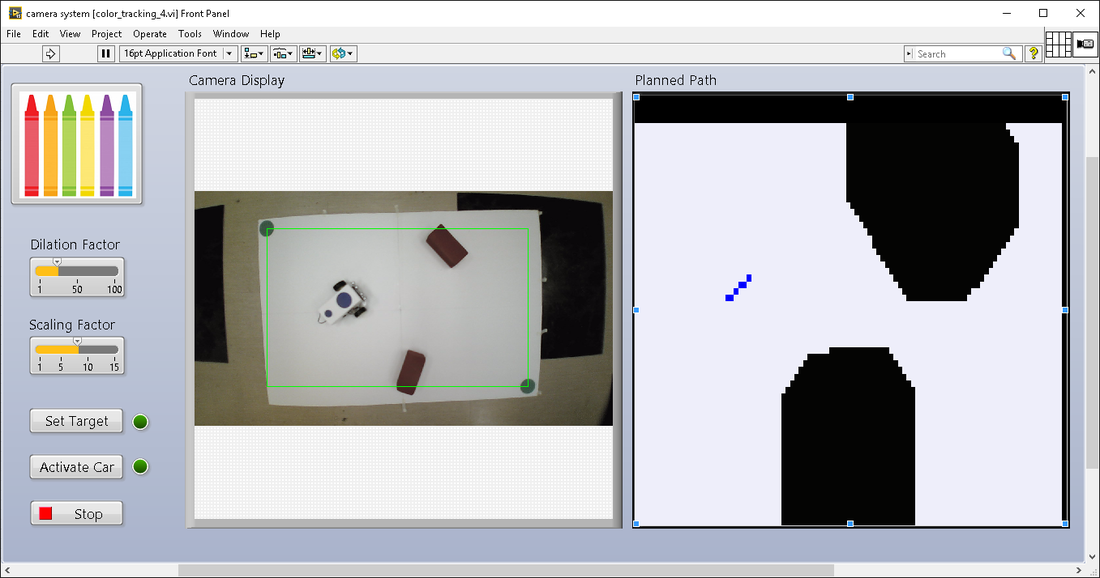
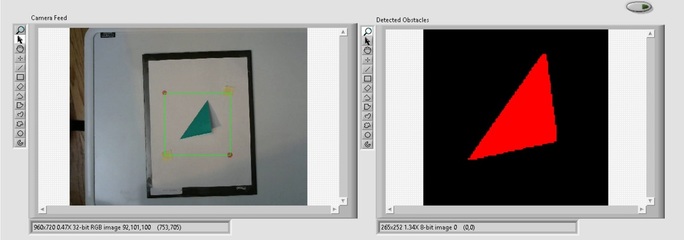
For this project, we want to use image processing techniques to remotely control multiple robots. By using an overhead camera connected to a master processing hub to simulate an aerial robot, we shift computational load away from controlled grounded robots to allow for the addition of more robots depending on the complexity of a task. Using color tracking algorithms, we can find the position of each robot relative to potential obstacles and other robots. This positional information will allow us to control the pathing of each grounded robot, which will be wheeled, electrically powered vehicles that can drive in the x and y-axes, potentially simultaneously. They will also possess telemetry that allows the computing hub to convey movement commands the grounded robots.
REFERENCES
Baker, S. P., Grabowski, J. G., Dodd, R. S., Shananhan, D. F., Lamb, M. W., and Li, G. H. (2005). Ems helicopter crashes: What influences fatal outcome? Annals of Emergency Medicine.
Hincheym, M. G., Sterritt, R., and Rouff, C. (2013). Swarms and swarm intelligence. IEEE.
Liu, X. and Gong, D. (2011). A comparative study of a-star algorithims for search and rescue in perfect maze. IEEE.
Hincheym, M. G., Sterritt, R., and Rouff, C. (2013). Swarms and swarm intelligence. IEEE.
Liu, X. and Gong, D. (2011). A comparative study of a-star algorithims for search and rescue in perfect maze. IEEE.
PICTURES
VIDEOS
|
|
|
|
|
|
|
|
|
